Dernière modification le
- 1. Introduction
- 2. Présentation du produit
- 2.1 Références concernées
- 2.2 Dimensions
- 2.3 Description des commandes en façade
- 2.4 Liste des défauts
- 2.5 Consignes de sécurité et avertissement
- 2.6 Onduleur CEM et niveau de bruit
- 2.7 Dispositif de protection
- 2.8 Élimination
- 2.9 Nettoyage
- 2.10 Identification du produit
- 2.11 Principe de fonctionnement
- 2.12 Modes de fonctionnement
- 2.13 Schémas électriques
- 2.14 Protection
- 2.15 Stockage
- 3. Mise en service du produit
- 3.3 Exigences d’entrée et de sortie
- 3.4 Visuel disjoncteurs et fusibles pour l’AEA10000
- 3.5 Raccordement au electriques
- 3.6 Raccordement du tore de mesure
- 3.7 Branchement des panneaux photovoltaïques
- 3.8 Mise en marche des batteries
1. Introduction
1.1 Lecteurs ciblés
Seuls des électriciens professionnels ou du personnel qualifié peuvent transporter ou installer ce produit.
L’opérateur doit être parfaitement familiarisé avec la structure et le principe de fonctionnement de l’ensemble du système de stockage d’énergie.
L’opérateur doit être parfaitement familiarisé avec ce manuel.
L’opérateur doit être parfaitement familiarisé avec les normes locales du projet.
1.2 Comment utiliser ce manuel
Lisez ce manuel avant l’installation du produit.
Le contenu de ce manuel sera périodiquement mis à jour ou révisé si nécessaire. Cependant, des divergences ne peuvent être exclues.
D’autres symboles peuvent être utilisés pour mettre en évidence les informations dans ce manuel, veuillez les lire attentivement :
2. Présentation du produit
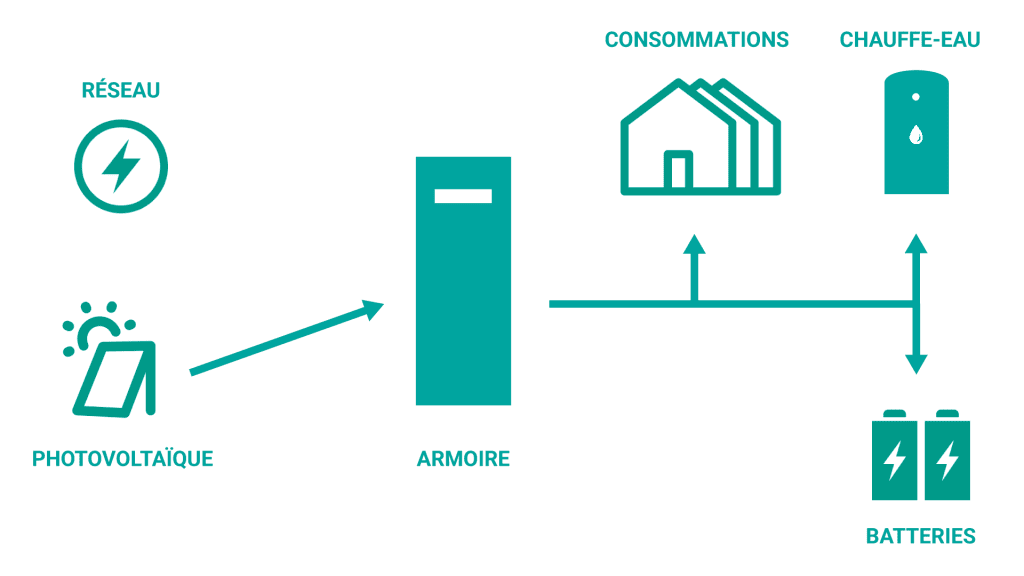
Les armoires AEA ont été développées dans le but de délivrer une alimentation électrique fiabilisée à partir de différentes sources d’énergies d’origine conventionnelle et renouvelables.
Ces armoires favorisent l’autoproduction et facilitent l’autoconsommation de l’énergie électrique générée, afin de réduire la consommation d’électricité provenant du réseau électrique.
Les armoires AEA offrent la possibilité de mesurer et optimiser un point de consommation monophasé et de piloter un ballon d’eau chaude sanitaire résistif (option).
2.1 Références concernées
| Référence | Nom du produit |
|---|---|
| 2EN01-00310 | AEA3000-S (2022) |
| 2EN01-00318 | AEA3000-S Site isolé (2022) |
| 2EN01-00321 | AEA3000-S Site isolé (2023) |
| 2EN01-00317 | AEA3000-M (2022) |
| 2EN01-01400 | AEA3000-M Site isolé (2022) |
| 2EN01-01401 | AEA3000-M Site isolé (2023) |
| 2EN01-00312 | AEA3000-L (2022) |
| 2EN01-01500 | AEA3000-L Site isolé (2022) |
| 2EN01-01501 | AEA3000-L Site isolé (2023) |
| 2EN01-00309 | AEA5000-S (2022) |
| 2EN01-01600 | AEA5000-S Site isolé (2022) |
| 2EN01-01601 | AEA5000-S Site isolé (2023) |
| 2EN01-00311 | AEA5000-M (2022) |
| 2EN01-00212 | AEA5000-M Site isolé (2022) |
| 2EN01-00215 | AEA5000-M Site isolé (2023) |
| 2EN01-00319 | AEA5000-L (2022) |
| 2EN01-01700 | AEA5000-L Site isolé (2022) |
| 2EN01-01701 | AEA5000-L Site isolé (2023) |
| 2EN01-00314 | AEA10000-L (2022) |
| 2EN01-00305 | AEA10000-L Site isolé (2022) |
| 2EN01-00306 | AEA10000-L-3PH (2022) |
| 2EN01-00320 | AEA10000-L-3PH Site isolé (2022) |
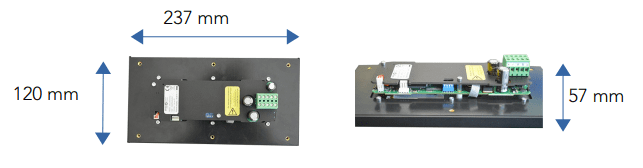
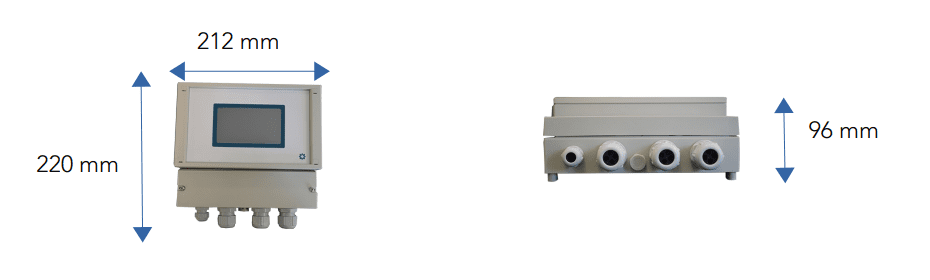
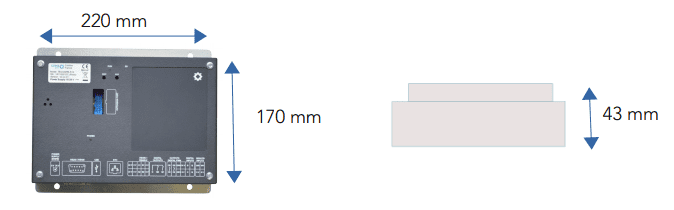
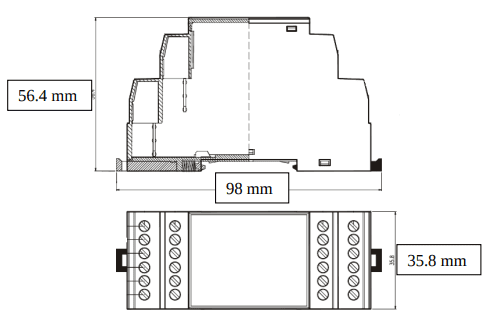
2.2 Dimensions
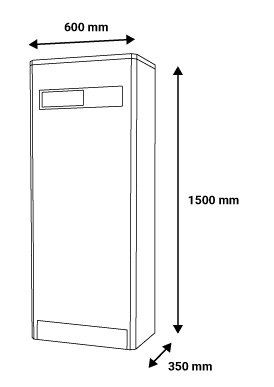 | 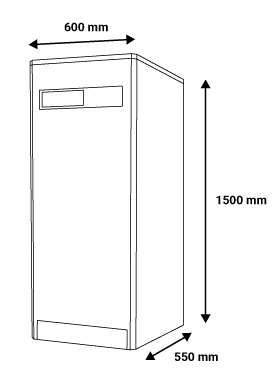 | 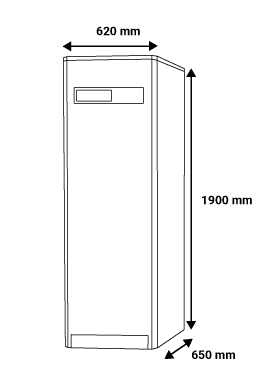 |
| AEA taille S 150 x 60 x 35 cm | AEA taille M 150 x 60 x 55 cm | AEA taille L 190 x 62 x 65 cm |
Avertissement Ne rien poser dessus. Laisser un espace de vide de minimum 5 cm sur les côtés et l’arrière de l’armoire, et de minimum 20 cm au-dessus de l’armoire.
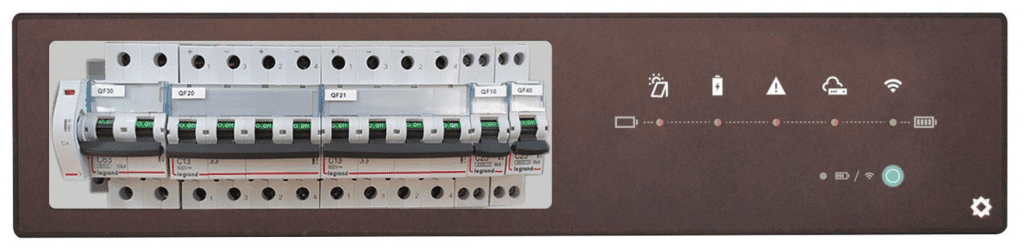
2.3 Description des commandes en façade
| Icône | Description |
|---|---|
 | Voyant solaire 🟢 Vert fixe : production en cours mais production inférieure à la consommation 🟢 Vert clignotant lent : production en cours, la production couvre les besoins du logement, le surplus est chargé dans la batterie 🟢 Vert clignotant rapide : production en cours, la production couvre les besoins du logement, le surplus est chargé dans la batterie et le surplus restant est injecté sur le réseau 🔴 Rouge clignotant : mode secours (option) 🔴 Rouge fixe : armoire à l’arrêt ou aucun mode sélectionné ⚫ Éteint : pas de production |
 | Voyant batterie 🟢 Vert clignotant : charge en cours 🟢 Vert fixe : décharge en cours 🔴 Rouge fixe : batterie faible ou autre défaut batterie ⚫ Éteint : pas de charge, ni décharge |
 | Voyant avertissement 🔴 Rouge fixe : présence d’au moins un défaut ⚫ Éteint : pas de défaut |
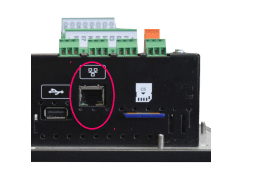
 | Voyant télégestion 🟢 Vert fixe : communication avec le serveur en cours 🔴 Rouge fixe : erreur de connexion au serveur ⚫ Éteint : pas d’adresse IP reçue (pas de connexion DHCP à la box) |
 | Voyant WiFi 🟢 Vert fixe : Réseau Wifi détecté ⚫ Éteint : réseau Wifi non détecté |
| Voyant mode 🟢 Vert fixe : Affichage SOC (niveau) batterie en cours (affichage temporaire suite à appui sur le bouton) ⚫ Éteint : Affichage standard en cours |
2.4 Liste des défauts
| Intitulé | Action |
|---|---|
| Défaut parafoudre | Vérifier l’état des parafoudres PF10 / PF20 |
| Défaut de communication RS485 avec le onduleur | Vérifier les connexions entre onduleur et automate (OND1 / API1) |
| Défaut de communication RS485 avec le BMS A16 | Vérifier l’état du disjoncteur AC QF10, du groupe électrogène ainsi que les connexions |
| Défaut démarrage groupe | Vérifier l’état du disjoncteur AC QF10 du groupe électrogène ainsi que les connexions |
| Défaut PV (24h sans production) | Vérifier l’état du disjoncteur PV QF20 |
| Défaut de communication RS485 avec le gradateur | Vérifier les connexions entre automates (API1 / GDT1) |
| Défaut de communication CAN entre BMS A16 et batterie | Vérifier les connexions entre automate et batterie (API2 / BAT) |
| Défaut de communication CAN entre BMS A16 et onduleur | Vérifier les connexions entre automate et onduleur (API2 / OND1) |
| Défaut batterie EMSAbsent | Redémarrer les batteries en coupant QF30 |
| Défaut batterie IBMSConfigurationProblem | Redémarrer les batteries en coupant QF30 |
| Défaut batterie NumberOfSlaveProblem | Redémarrer les batteries en coupant QF30 |
| Défaut batterie PowerBusInformation | Redémarrer les batteries en coupant QF30 |
| Tension batterie faible | Redémarrer les batteries en coupant QF30 |
| Tension batterie haute | Redémarrer les batteries en coupant QF30 |
| Défaut batterie GlobalIBMSAlarmState | Redémarrer les batteries en coupant QF30 |
| Défaut onduleur FaultList | Redémarrer en coupant l’ensemble des disjoncteurs, attente 1mn puis relancer |
| Défaut onduleur Inverter Alarm Information | Redémarrer en coupant l’ensemble des disjoncteurs, attente 1mn puis relancer |
| Défaut onduleur Internal Information | Redémarrer en coupant l’ensemble des disjoncteurs, attente 1mn puis relancer |
| Défaut onduleur Battery Fault Information | Redémarrer en coupant l’ensemble des disjoncteurs, attente 1mn puis relancer |
| Défaut onduleur PackFaultSN | Redémarrer en coupant l’ensemble des disjoncteurs, attente 1mn puis relancer |
| Défaut BMS wFaultAutomateSyst | Redémarrer les batteries en coupant QF30 |
| Défaut BMS wFaultBmsSyst | Redémarrer les batteries en coupant QF30 |
| Défaut BMS Fault0_7 | Redémarrer les batteries en coupant QF30 |
| Défaut BMS Fault8_15 | Redémarrer les batteries en coupant QF30 |
| Défaut BMS Fault16_23 | Redémarrer les batteries en coupant QF30 |
| Défaut BMS Fault24_31 | Redémarrer les batteries en coupant QF30 |
| Défaut BMS Fault32_35 | Redémarrer les batteries en coupant QF30 |
| Température batteries basse | Contrôler la température du local |
| Niveau bas batterie | Alerte |
| Niveau bas de l’état de santé batterie (SOH) | Alerte |
| Température batteries haute | Contrôler la température du local |
| Température haute CTN dissipateur du gradateur | Contrôler la température du local et vérifier l’état des aérations |
| Température haute CTN interne du gradateur | Contrôler la température du local et vérifier l’état des aérations |
| Défaut détection WIFI | Vérifier les connexions |
2.5 Consignes de sécurité et avertissement
Avertissement Tout dommage résultant d’un non-respect du présent manuel utilisateur entraîne l’annulation de la garantie ! Nous déclinons toute responsabilité pour d’éventuels dommages matériels ou corporels dus à un maniement incorrect ou à la non observation des consignes de sécurité.
Du point de vue de la sécurité, ce matériel a quitté l’usine en parfait état. Afin de maintenir ce matériel en bon état et d’en assurer l’utilisation correcte sans risque, l’utilisateur doit tenir compte des consignes de sécurité et avertissements contenus dans ce manuel. Dans les installations industrielles, il convient d’observer les prescriptions de prévention des accidents, relatives aux installations et aux matériels électriques.
L’installation de ce type de matériel doit toujours être faite par un professionnel compétent. L’ouverture des capots ou le démontage des pièces risquent de mettre à nu des éléments sous tension ; avant d’intervenir sur l’appareil, il faut le débrancher de toutes les sources de tension. Cependant les condensateurs de l’appareil peuvent encore être chargés même lorsque l’AEA a été déconnectée. L’armoire AEA doit obligatoirement être installée dans un local à température ambiante. Si le bon fonctionnement de l’appareil n’est plus assuré, il convient de mettre celui-ci hors tension et d’empêcher toute remise en marche intempestive. Il faut alors contacter votre installateur.
Le niveau de protection de l’AEA est IP32, elle est conçue pour une installation en intérieur.
Observer les pictogrammes suivants :
 |  |  |
| Attention | Courant direct | Marquage CE |
| Sur l’étiquette du produit, ce symbole signifie que l’avis doit être consulté. Dans ce manuel, ce symbole indique des informations importantes. | A venir | Ce dispositif est homologué CE et est conforme aux lignes directrices nationales et européennes |
2.6 Onduleur CEM et niveau de bruit
La compatibilité électromagnétique (CEM) est l’exigence pour l’équipement électrique qu’il puisse fonctionner normalement dans l’environnement électromagnétique et ne provoque pas lui-même un impact environnemental inacceptable.
- Propriété anti interférence des composants internes.
- Propriété anti-interférence de l’extérieur.
- Impact des émissions électromagnétiques sur l’environnement.
L’onduleur peut générer du bruit et des rayonnements électromagnétiques pendant le fonctionnement. Selon les émissions CEM et le niveau de bruit, l’AEA doit être utilisé dans des environnements industriels. Par conséquent, tout le personnel ne doit pas rester longtemps à proximité de l’AEA.
2.7 Dispositif de protection
Un système de protection contre les courts-circuits doit être positionné sur le démarrage continu de 24 volts alimentant l’automate. Ces fusibles seront dimensionnés en fonction du nombre de dispositifs mis en série derrière le départ.
2.8 Élimination
Les vieux appareils électroniques sont des produits recyclables qui ne devraient pas être jetés dans la poubelle. Si l’appareil atteint la fin de sa vie, il doit être éliminé conformément aux réglementations légales en vigueur dans les centres de récupération de votre municipalité. L’élimination dans les ordures ménagères est interdite.
2.9 Nettoyage
Pour le nettoyage, utiliser un chiffon propre, sec, antistatique et non pelucheux sans produits corrosifs.
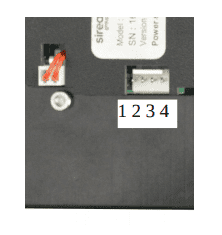
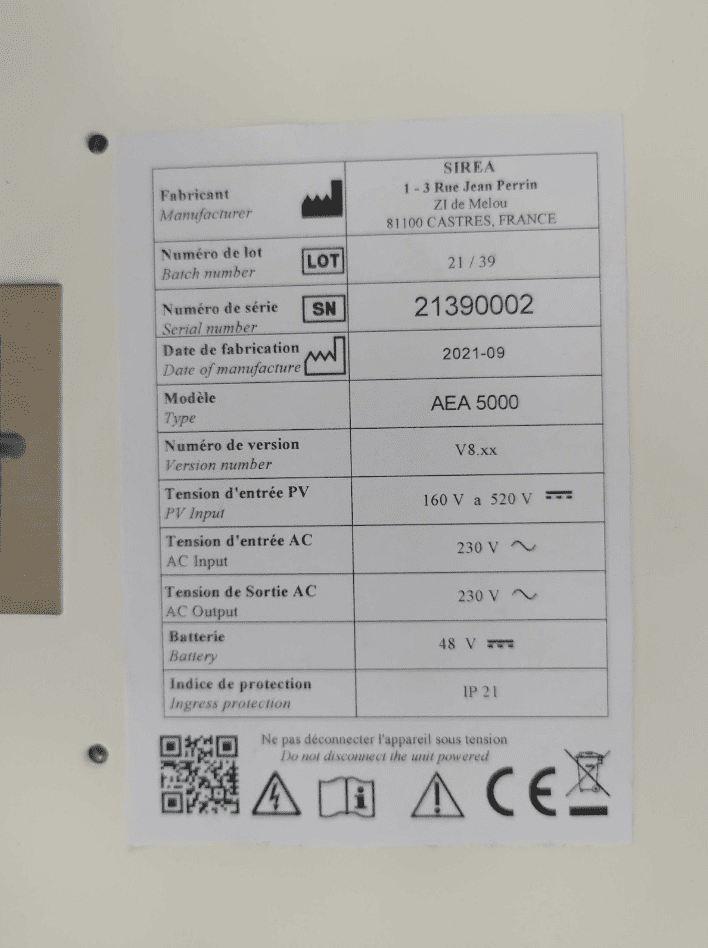
2.10 Identification du produit
Pour identifier le produit, une étiquette avec un code barre est collée sur la paroi intérieure de la porte de l’armoire. Le numéro de série (SN) figure dans la troisième ligne du tableau.

2.11 Principe de fonctionnement
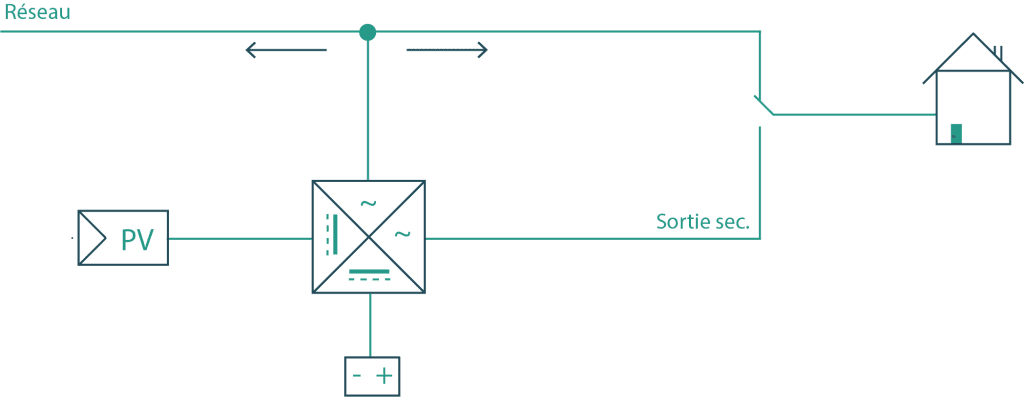
L’énergie provenant de la source renouvelable est prioritairement utilisée pour la consommation. En cas d’excédent de production d’énergie, celle-ci est stockée dans la batterie. Si la batterie atteint un niveau de charge plein, le puissance du panneau sera bridée pour ne pas envoyer de puissance sur le réseau (dans le cas de vente au réseau, se référer au paragraphe 4.3)
Pour le cas où la production d’énergie renouvelable est insuffisante, le complément d’énergie nécessaire à la consommation est fourni prioritairement par la batterie. Si la batterie atteint un niveau de charge bas, l’énergie manquante est soutirée du réseau électrique.
Dans le cas où la demande est supérieure à la puissance maximum de l’armoire, le complément est fourni par le réseau.
2.12 Modes de fonctionnement
Fréquence réseau ou groupe : 45Hz-55Hz
Tension réseau ou groupe : 150V-283V
Selon l’installation, l’AEA peut être Off-Grid ou On-Grid (connecté ou déconnecté du réseau).
2.12.1 Fonctionnement mode On-Grid
SOC batteries supérieur à 21 % (batteries Phenix) ou supérieur à 11% (batteries) RITAR
- L’AEA injecte de la puissance pour réguler la puissance soutirée du réseau à 0W.
- Si la production photovoltaïque est supérieure à la consommation, elle alimente la consommation et la charge des batteries.
- Si la production photovoltaïque est inférieure à la consommation, elle alimente avec les batteries la consommation.
- Si la production photovoltaïque combinée avec les batteries ne suffisent pas à répondre au besoin, le réseau complétera la demande.
SOC inférieur ou égal à 21 % (batteries Phenix) ou supérieur à 11% (batteries) RITAR
- La consommation est alimentée par le réseau et la puissance photovoltaïque.
- Si la production photovoltaïque est supérieure à la consommation, elle rechargera les batteries.
- Il faudra que les batteries soient rechargées à 25 % ou 15% (selon batterie) pour relancer la régulation.
2.12.2 Fonctionnement mode Off-Grid
SOC batteries supérieur à 21 %
- Si la production est supérieure à la consommation, elle alimente la consommation et charge les batteries.
- Si la production est inférieure à la consommation, combinée avec les batteries, elle alimente la consommation. La consommation ne peut être supérieure à la puissance nominale de l’armoire.
- Lorsque la batterie atteint 22% le contact entre les bornes XC1 et XC2 se ferme (démarrage groupe), le contact est maintenu fermé jusqu’à ce que les batteries soient rechargé à 60% (réglable en usine)
SOC inférieur ou égal à 21 %
- L’onduleur arrête de produire du 230V (coupure d’électricité). Il faudra que les batteries soient rechargé au moins à 25 % pour le relancer.
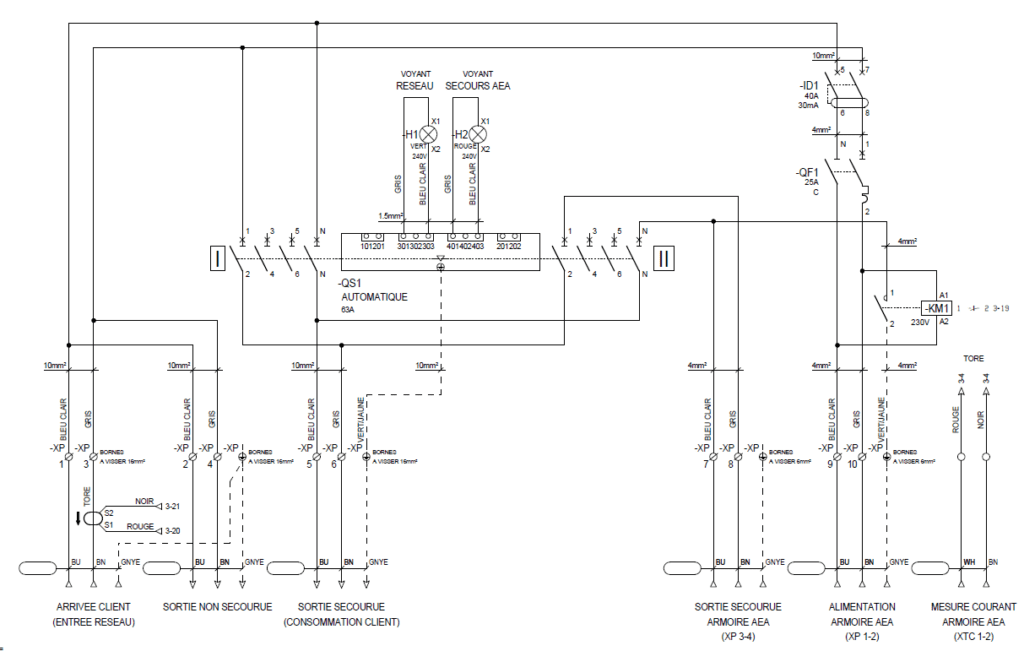
2.13 Schémas électriques
L’onduleur de l’AEA convertit le courant continu généré par les modules PV en courant continu sur le bus, puis en courant continu pour charger la batterie ou en courant alternatif. Il peut également convertir le DC de la batterie en AC. Ensuite, le courant alternatif est filtré en électricité sinusoïdale et injecté dans le réseau via un transformateur d’isolement moyenne tension.
2.13.1 Schéma électrique standard
A venir
2.13.2 Schéma électrique de l’AEA10000 triphasée

2.14 Protection
2.14.1 Anti-îlotage
Lorsque le réseau électrique local est coupé en raison d’un dysfonctionnement ou d’une maintenance des équipements, l’AEA sera physiquement coupé du raccordement au réseau, afin de protéger le personnel d’exploitation travaillant sur le réseau électrique. L’armoire est donc conforme aux normes applicables.
2.14.2 Protection foudre
Le module de protection contre la foudre de l’armoire est doté d’une protection contre les surtensions côté DC/AC pour éviter un endommagement de l’AEA.
2.15 Stockage
Si beaucoup de temps s’écoule avant l’installation ou l’utilisation, l’armoire doit être stockée de manière appropriée.
- L’emballage doit être remis dans son état d’origine
- L’AEA ne peut être stockée que lorsqu’elle est arrêtée et toutes les portes sont fermées
- Dans un local sec pour protection des circuits internes de la poussière et de l’humidité
- Température de stockage : Pylontech -20°C~60 °C SNAM 5°C~36°C
- Humidité de stockage : 0 %~90%
- Altitude maximale : 2000 m
Avertissement Stockage strictement interdit sans emballage ! Éviter le stockage directement au soleil. Garder l’armoire à la verticale et éviter de poser des affaires sur le toit.
3. Mise en service du produit
3.1 Installation des batteries
Les armoires AEA sont prévues pour recevoir des batteries de la marque Phenix Batteries ou Ritar selon l’achat. Pour obtenir les informations complémentaires sur les batteries, se référer à la notice jointe en complément de ce document. Les batteries sont livrées avec leurs câbles d’alimentation. Le câble de communication à brancher sur la batterie est déjà connecté dans l’armoire.
3.2 Mise en place des batteries
Danger Avant démontage de la porte, s’assurer que les sources d’alimentation soient coupées par l’intermédiaire de l’ensemble des disjoncteurs.
3.2.1 Ouverture de la porte en façade


3.2.2 Mise en place de plusieurs batteries de la marque Phenix Batterie
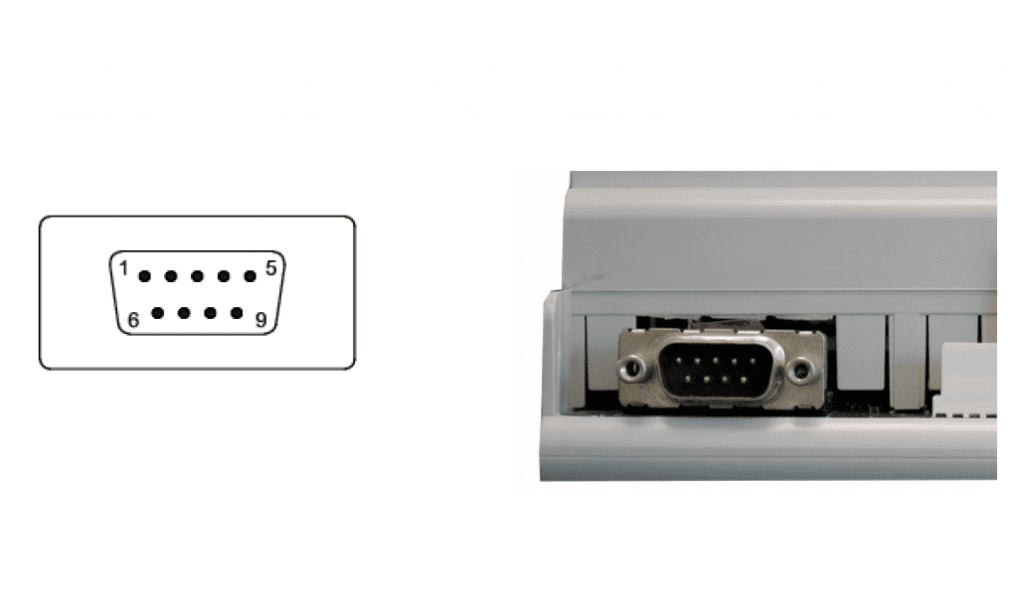
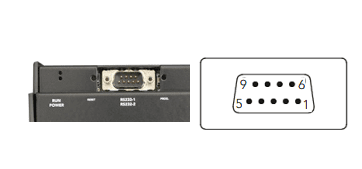
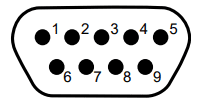
- Faire glisser la batterie sur les rails de guidage jusqu’au fond afin de laisser la place pour la prochaine. Face à l’armoire, la prise de communication DB9 doit se trouver sur la gauche.
- Faire glisser la seconde batterie sur les rails de guidage, toujours avec la prise DB9 sur la gauche.
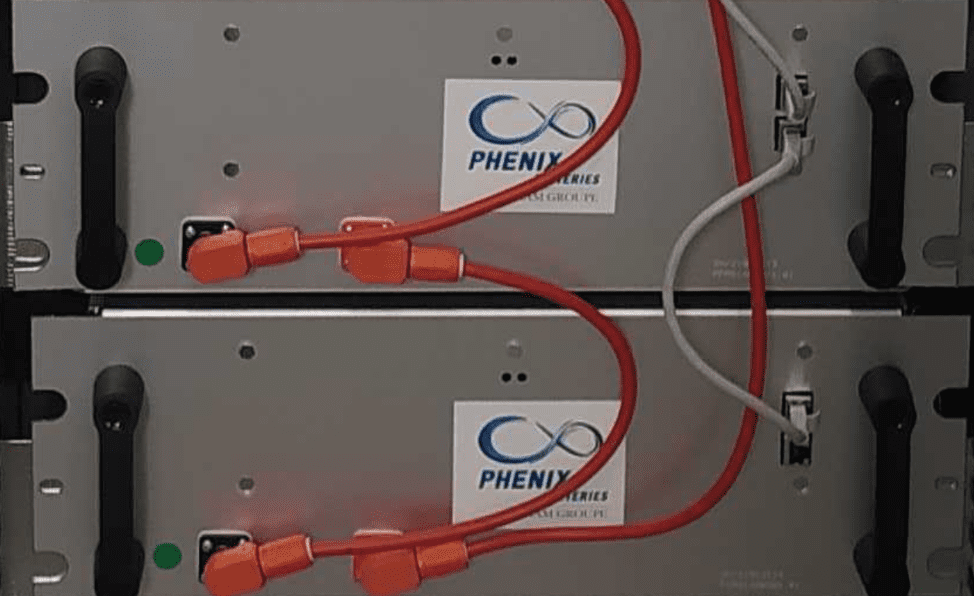
3.2.3 Branchement des batteries Phenix pour AEA3000 et AEA5000
Brancher les connecteurs noirs sur bornes noires et connecteurs orange sur bornes oranges.
Brancher les prises de communication (nappe multicolore). La prise au bout de la nappe doit aller sur la prise DB9 de la batterie du fond et l’autre prise sur la plus proche de la face avant.
Avertissement Veiller à enfoncer correctement les prises.

3.2.4 Installation des batteries RITAR
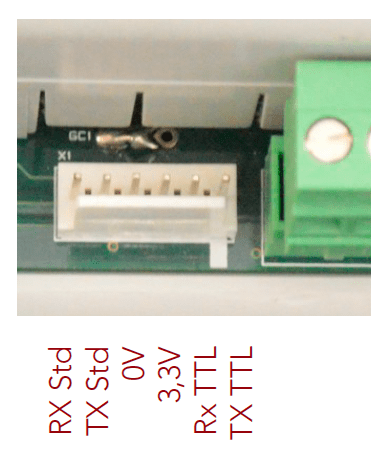
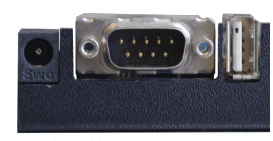
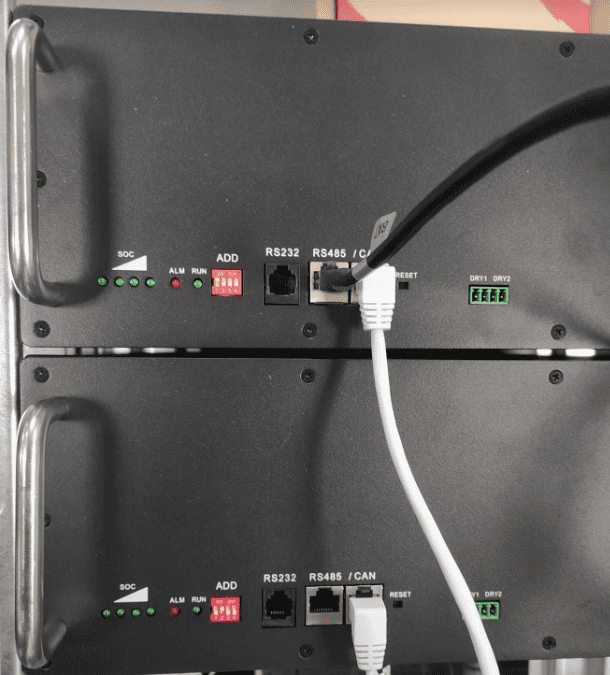
En fonction de la date de fabrication de votre armoire, les batteries RITAR peuvent être différentes. La version avant 2024 possède trois prises de communication en façade : RS485/CAN, RS232. La version à partir de 2024 en possède quatre : RS485, CAN, Link-In et Link-Out. En fonction du modèle de batterie, les branchements sont différents
Modèle avant 2024
Brancher le câble RJ45 venant de l’armoire sur la batterie de devant sur le port RS485. En partant de la batterie de devant brancher le petit RJ45 entre les ports CAN des deux première batteries puis entre les port RS485 entre la deuxième et la troisième etc…
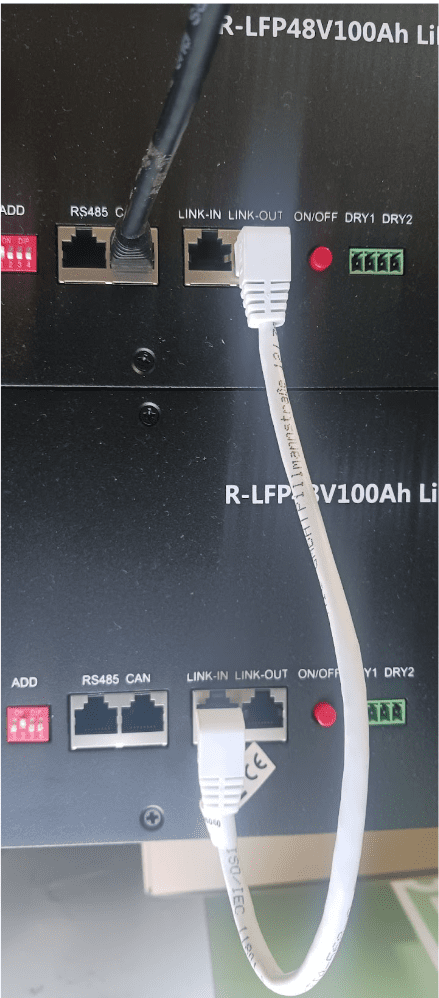
Modèle à partir de 2024
Brancher le câble RJ45 venant de l’armoire sur la batterie de devant sur le port CAN.
En partant de la batterie de devant, brancher le petit RJ45 entre les ports Link-Out de la première batterie et Link-In de la deuxième puis entre Link-Out de la deuxième et Link-In de la troisième et ainsi de suite jusqu’à atteindre la dernière batterie.
Pour les deux modèles :
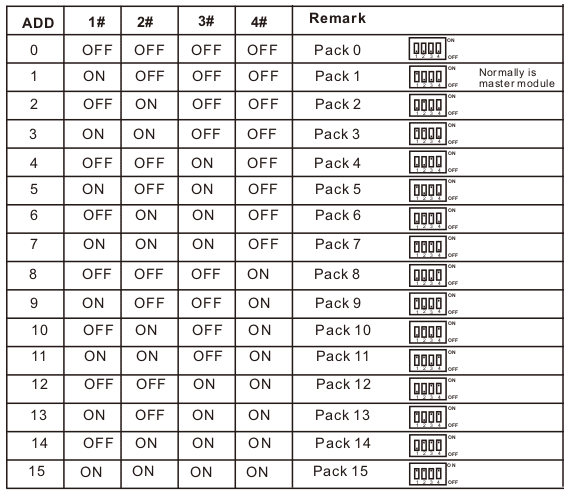
Les switch ADD doivent être réglé. La batterie de devant doit avoir le switch ADD monté à 1, la seconde batterie doit avoir le switch ADD à 2.
Si il y a plus de 2 batteries se référer au tableau suivant :
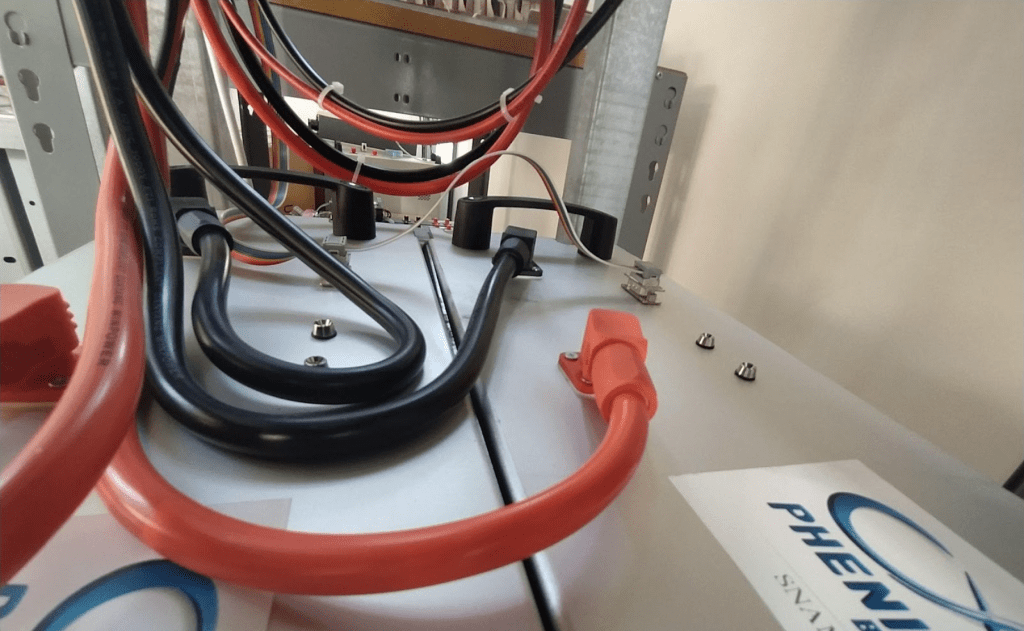
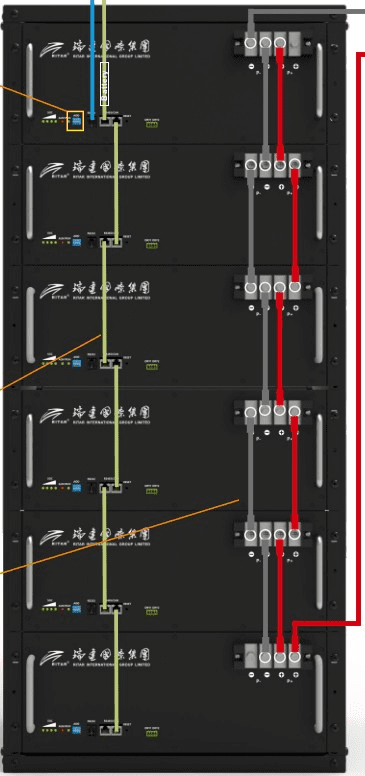
Brancher le câble rouge venant du bornier AEA sur le pôle P+ de la batterie la plus au fond.
Brancher le câble noire venant du bornier AEA sur le pôle P- de la batterie la plus devant.
Relier les pôle P+ de chacune des batteries avec les câbles fournis
Relier les pôle P- de chacune des batteries avec les câbles fournis
Voir photo ci dessous :
Pour allumer la batterie :
- Vérifier le câblage des câbles de puissances
- Activer le disjoncteur présent sur chaque batterie
- A l’aide d’un outil fin appuyer environ 4s sur le bouton « RESET » de la première batterie seulement (ou on/off sur les nouvaux modèles)
- 5 secondes après avoir appuyé sur le bouton « RESET » toutes les autres batteries doivent s’allumer
Pour éteindre les batteries :
- Couper le disjoncteur QF30
- Couper les disjoncteurs présents sur les batteries
- Appuyer environ 5s sur le bouton « RESET » ou ON/Off d’une batterie les voyants doivent tous s’allumer les uns après les autres puis s’éteindre complètement
- Répéter l’opération pour chacune des batteries
3.2.5 Branchement des batteries pour AEA10000
L’AEA10000 possède un Master BMS déjà intégré dans l’armoire à la livraison. une fois les batteries mises en place il faut brancher les câbles de puissances comme indiqué sur les photos. Les câbles de puissances sont représentés en rouge.
Info Le MBMS doit avoir sa borne noire connectée à la première batterie de la chaîne. La borne rouge du MBMS doit être connectée à la dernière batterie de la chaîne.
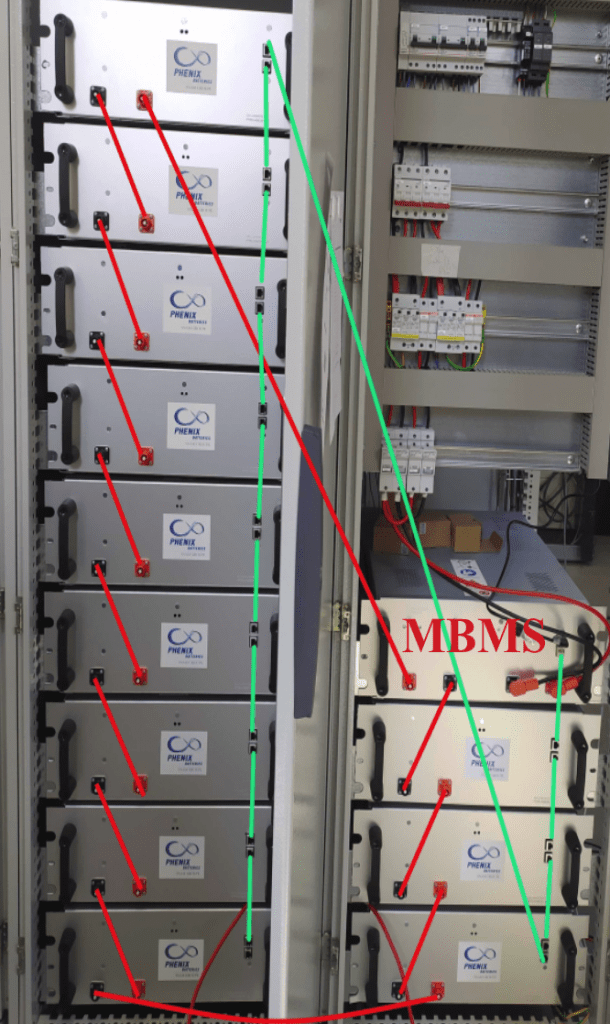
Connexion du MBMS :
- Connecter la borne noire du MBMS à la borne noire de la batterie située en dessous.
- Connecter la borne rouge du MBMS à la borne rouge de la dernière batterie (sur l’image batterie en haut à gauche).
- Brancher les câbles de communication comme indiqué sur la photo ci-contre.
Danger Si votre installation est hors-réseau (offgrid), dès que les câbles de puissances sont connectés au BMS, le disjoncteur QF30 a une tension supérieure à 200V à ses bornes (les manchons oranges signifient qu’il y a de la tension même lorsque l’installation est hors tension).

Vérifier la tension DC aux bornes du disjoncteur QF30
3.3 Exigences d’entrée et de sortie
Danger Il existe un risque de choc électrique de haute tension lors du fonctionnement de l’AEA. Seuls des électriciens possédant des compétences professionnelles peuvent opérer. Toutes les connexions avec cet équipement doivent être effectuées hors tension. L’AEA peut être endommagé si la borne d’entrée ou de sortie est mal branchée. Le non-respect de ces informations peut entraîner des blessures corporelles graves, voire mortelles et des pertes matérielles importantes.
| Câble (Cu) | Exigences section de câble (mm2) | Serrage |
| Terre | Minimum 6 mm2. Vert et jaune recommandé | ct > 8,20N*m |
| Photovoltaïque | Minimum 4 mm2 | ct > 8,20N*m |
| Alimentation armoire | Minimum 2.5 mm² | ct >= 8,20N*m |
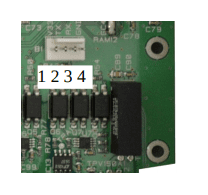
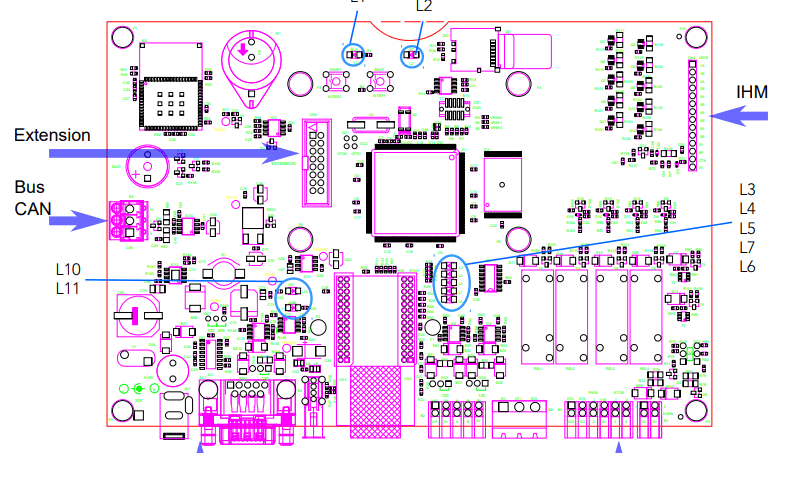
3.4 Visuel disjoncteurs et fusibles pour l’AEA10000

- Disjoncteur Schneider QF30 : coupure batterie
- QS20, 21 : sectionneur photovoltaïque
- QF40 : coupure sortie secourue

- PF20, 21 : Parafoudre photovoltaïque
- FU20, 21 : Fusibles PV
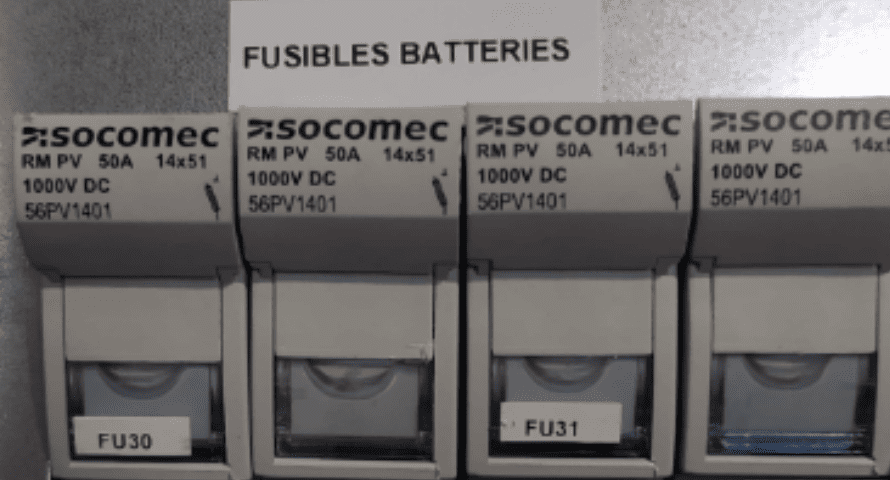
- FU30 et FU31 : Porte fusible batterie
3.5 Raccordement au electriques
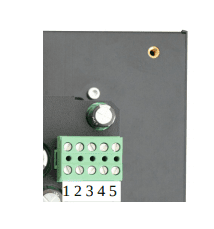
3.5.1 Branchement pour AEA3000 et AEA5000 monophasée

Brancher l’armoire au réseau électrique comme suit : brancher le neutre sur la borne 1 du bornier XP, la phase sur la borne 2 et la terre sur la prise de terre d’à côté.
3.5.2 Branchement pour AEA10000 monophasée
A venir
3.5.3 Branchement pour AEA10000 triphasée
Raccordement au réseau sur bornier XP : Neutre sur borne 1 ; phase 1 sur borne 2 ; phase 2 sur borne 3 ; phase 3 sur borne 4 ; terre sur borne terre (jaune et verte)
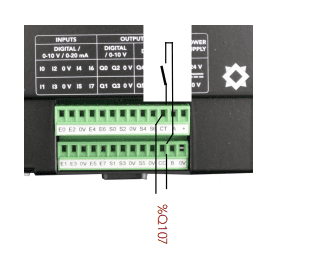
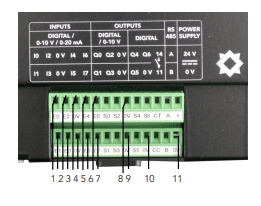
3.6 Raccordement du tore de mesure
3.6.1 Branchement pour AEA3000 et AEA5000 monophasée
Selon l’installation il peut y avoir 2 modèles différents :
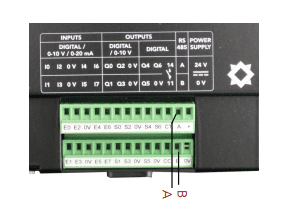
Avec fils rouge et jaune :

Raccorder le tore sur le bornier XTC, fil rouge sur borne 1 et fil jaune sur borne 2.
Fixer le tore sur la phase de l’arrivée client sur la ligne principale du logement afin de mesurer l’ensemble de la consommation : La flèche dans le tore doit être dirigée vers le réseau.
Lors de la mise en place de la rallonge pour le tore attention de bien respecter le branchement suivant : fil rouge à gauche et fil jaune à droite comme sur la photo (longueur max 15m).
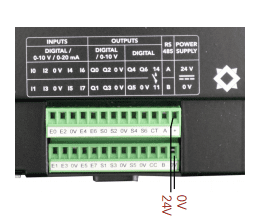
Avec fils noir et rouge :

Raccorder le tore sur le bornier XTC, fil noir sur borne 1 et fil rouge sur borne 2.
Fixer le tore sur la phase de l’arrivée client sur la ligne principale du logement afin de mesurer l’ensemble de la consommation : La flèche dans le tore doit être dirigée vers la consommation client.
Lors de la mise en place de la rallonge pour le tore attention de bien respecter le branchement suivant : fil rouge à droite et fil noir à gauche comme sur la photo (longueur max 15m).
3.6.2 Branchement pour AEA10000 monophasée
A venir
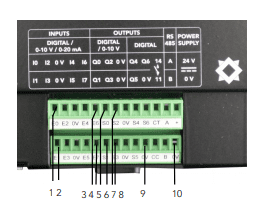
3.6.3 Branchement pour AEA10000 triphasée
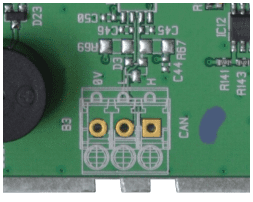
Selon l’installation il faudra raccorder ou non des tores de mesure. Le raccordement des tores se fait sur le bornier XTC en bas de l’armoire.
Avertissement Pour le raccordement il est important de respecter le sens des tores.
Selon l’installation il peut y avoir un bornier XC : XC1 et XC2 sont pilotés par un relais pour démarrer le groupe électrogène automatiquement. Lorsque l’état de charge atteint 22% le contact entre XC1 et XC2 se ferme. Il restera fermé jusqu’à ce que les batteries soient rechargé à 60% (réglable)
3.7 Branchement des panneaux photovoltaïques

Selon l’installation, le nombre de string PV peut varier. Les procédures spécifiques sont les suivantes :
- Débrancher la chaîne PV au niveau du champ avec les connecteurs MC4. Assurez-vous qu’il n’y a pas de tension sur les câbles côté DC.
- Déterminez les pôles positifs et négatifs avec un multimètre
- Connectez la première chaîne PV aux connecteurs MC4 identifiés « String 1 » sortant de l’armoire. Polarité positive connecté au câble rouge de l’armoire et polarité négative connecté au câble noir de l’armoire.
- Connectez la seconde chaîne PV aux connecteurs MC4 identifiés « String 2 » sortant de l’armoire. Polarité positive connecté au câble rouge de l’armoire et polarité négative connecté au câble noir de l’armoire.
3.8 Mise en marche des batteries
Info A faire au moment de la mise sous tension : les batteries sont mises en marche en actionnant le disjoncteur QF30. Les LED des batteries clignotent puis passent au vert fixe.
Attention Par cette action, on ferme le circuit et il y a maintenant de la tension au borniers XBA et aux bornes de QF30.
4. Paramétrage des options
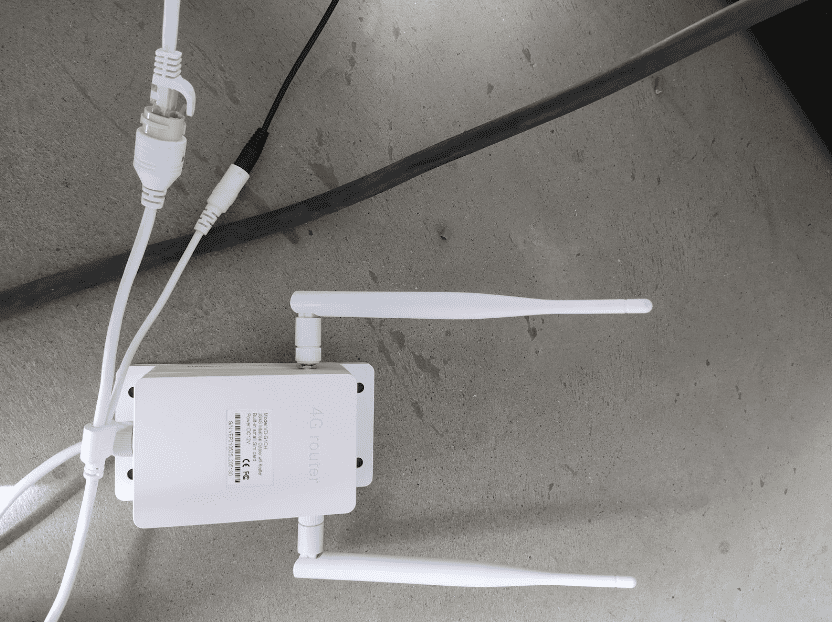
4.1 Routeur


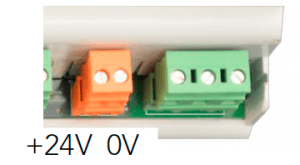
Le routeur doit être alimenté en 12V avec le câble venant du bornier XC. Il doit également être branché avec le câble RJ45. Voir photo.
Pré-requis
- Connexion Wifi disponible sur place
- Disposer d’un ordinateur ou d’un smartphone
- Disjoncteur ID10 sur ON
- Disjoncteur QF10 sur ON
- Voyant Wifi de l’armoire allumé (en vert)

Étape 1
Aller dans les paramètres wifi de votre ordinateur ou smartphone pour rechercher les réseaux aux alentours. Sélectionnez le routeur. Son nom est « AEA_21360xxx » (correspondant au numéro de série de l’armoire). Dans l’image ci-contre, après avoir cliqué sur « Se connecter » un mot de passe sera demandé. Il s’agit du numéro de l’AEA (2136xxxx).

Étape 2
Une fois connecté au routeur, ouvrir un navigateur Internet : Firefox, Chrome, Edge. Tapez dans la barre du haut : 192.168.100.1 et Lancer la recherche.

Étape 3
Vous arrivez sur cette page.
Il faut taper le mot de passe « admin » dans la barre puis appuyer sur « login ».

Étape 4
Vous arrivez sur cette page. Cliquez sur « WiFi Settings »

Étape 5
Allez dans l’onglet « Internet Wifi ». Puis cliquez sur « Add »

Étape 6
Sélectionnez le réseau WiFi du client dans la liste (en bas de la page) en cliquant sur la case à gauche du nom. Ensuite, tapez le mot de passe WiFi du client dans « Pass Phrase ». Puis cliquez sur « Apply »

Étape 7
Cochez la case correspondant au réseau WiFi du client puis cliquez sur « Connect ». Pour vérifier si les manipulations ont fonctionné, lancez une recherche sur internet (peu importe quoi). Si la recherche aboutie c’est que ça fonctionne et que l’armoire est connectée à Internet.
4.2 Gestion du ballon d’eau chaude sanitaire
4.2.1 Pilotage du ballon d’eau chaude sanitaire
L’AEA offre la possibilité de piloter un ballon ECS (Eau Chaude Sanitaire) résistif afin d’optimiser l’utilisation de l’énergie photovoltaïque.
Si l’option est activée la chauffe du ballon d’eau chaude sera prioritaire sur la charge des batteries. C’est-à-dire que le surplus d’énergie solaire sera utilisé en priorité pour chauffer l’eau du ballon.
La mise en chauffe se déclenche lorsque le surplus de puissance photovoltaïque est supérieur à la consommation du bâtiment et uniquement en heure pleine. La puissance de chauffe sera à peu près égale à la puissance de surplus. Si il n’y a plus de surplus la chauffe s’arrêtera graduellement en utilisant à ce moment l’énergie des batteries.
Le contacteur HP/HC existant reste fonctionnel dans son principe de HP/HC ou forçage marche, celui-ci pilote un contacteur interne à l’armoire qui inhibe le gradateur. En heure creuse la chauffe du ballon redevient classique et n’utilise plus le système de gradateur.
Production suffisante pour : 1. la consommation / 2. l’ECS / 3. les batteries
4.2.2 Raccordement du ballon d’eau chaude (20A max.)

On branche le ballon d’eau chaude sur le bornier XP, neutre sur la borne 5 et phase sur la borne 6.
4.3 Vente d’énergie au réseau
Lorsque cette option est activée les priorités sont d’assurer l’alimentation du bâtiment et la charge des batteries. Si il y a du surplus, au lieu de brider la production elle sera dirigée vers le réseau. Cette option nécessite un contrat de vente au réseau. Pour activer ou désactiver cette option prendre contact avec votre installateur.

Cas de vente au réseau : Si la puissance produite est suffisante, le surplus sera envoyé sur le réseau
Dans le cas ou les deux option sont activées l’ordre de priorité sera le suivant :
- Consommation du bâtiment
- Chauffe du ballon
- Charge des batteries
- Vente au réseau
4.4 Sortie secourue
4.4.1 Gestion de la sortie secourue
L’AEA dispose d’une sortie secourue, celle-ci assure une source d’énergie provisoire en cas de coupure secteur, volontaire ou non. Cette sortie est alimentée quand le système est sous tension secteur et reste alimentée si l’entrée secteur est coupée.
Les batteries prennent le relais de l’alimentation secteur sur cette sortie secourue en générant une tension de sortie AC (230VAC), similaire en l’entrée secteur.
4.4.2 Raccordement de la sortie secourue
Brancher la sortie secourue sur le bornier XP, neutre sur la borne 3 et phase sur la borne 4.
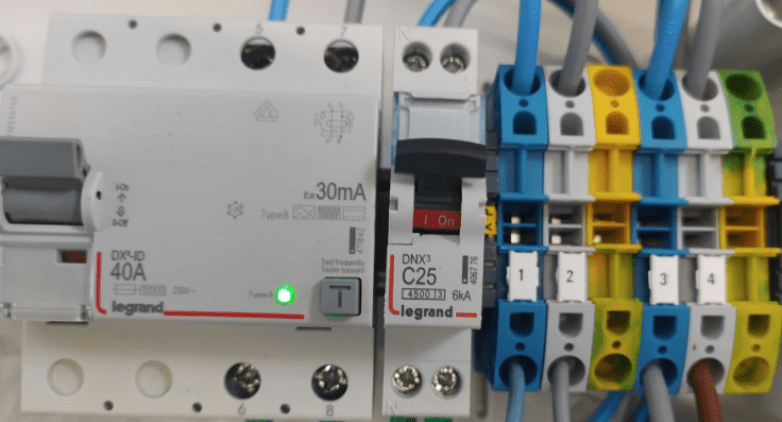
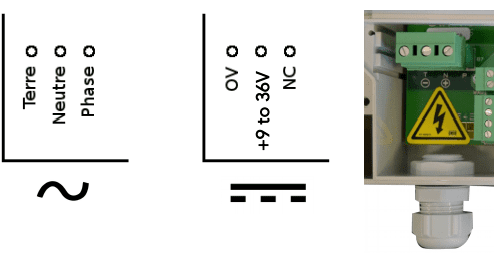
Branchement du coffret AC
Le raccordement d’une sortie secourue nécessite un coffret AC. Celui-ci est équipé d’un différentiel et d’un disjoncteur.
- Brancher l’arrivée réseau : neutre borne 1, phase borne 2, terre sur la borne terre d’à côté.
- Brancher la borne 3 du coffret à la borne 1 de l’AEA (neutre).
- Brancher la borne 4 du coffret à la borne 2 de l’AEA (phase).
- Brancher la dernière borne de terre du coffret à la borne de terre de l’AEA
4.5 Coffret back-up
4.5.1 Mise en service du coffret back-up
Avant d’actionner le disjoncteur en amont du coffret, s’assurer que le disjoncteur différentiel est en position OFF.
Actionner le disjoncteur en amont de l’installation puis actionner tous les autres disjoncteurs de l’installation (réenclencher le disjoncteur différentiel si celui-ci disjoncte).
Attendre au moins 1 minutes et 30 secondes (après avoir activé les disjoncteurs) avant de tester le fonctionnement du coffret back-up.
Pour tester le coffret back-up couper le disjoncteur général et vérifier que les charges devant être alimentées sont toujours allumées. Ré-enclencher le disjoncteur général et vérifier que toute les charges sont alimentées.
Pour le câblage, se référer au schéma suivant :

Avec coffret AC
Si présence de l’option coffret AC + option coffret back-up suivre le schéma suivant pour câbler les différents éléments

Selon l’installation le coffret AC peut être intégré au coffret back-up (Disjoncteur différentiel et disjoncteur 16A ou 25A dans le coffret back-up) :

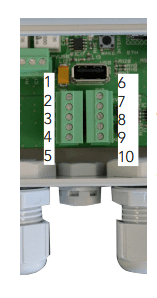
Schéma coffret back-up :
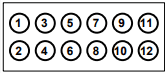
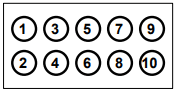
Brancher sur les borne 1 et 3 l’arrivée du réseau électrique
Borne 1 : neutre arrivé réseau
Borne 3 : phase arrivé réseau
Brancher sur les bornes 2 et 4 la partie électrique bâtiment qui n’est pas secourue.
Borne 2 : neutre sortie non secourue
Borne 4 : phase sorite non secourue
Brancher sur les bornes 5 et 6 les systèmes électriques à secourir en cas de coupure
électrique
Borne 5 : neutre sortie secourue
Borne 6 : phase sorite secourue
Brancher sur les bornes 7 et 8 l’armoire AEA
Borne 7 : neutre devant être relié à la borne 3 de l’AEA
Borne 8 : phase devant être relié à la borne 4 de l’AEA
Brancher sur les bornes 9 et 10 l’armoire AEA
Borne 7 : neutre devant être relié à la borne 1 de l’AEA
Borne 8 : phase devant être relié à la borne 2 de l’AEA
5. Mise en fonctionnement
5.1 Mise sous tension / hors tension pour AEA3000 et AEA5000
Les inter-sectionneurs en façade sont des dispositifs de coupure omnipolaires utilisables pour la coupure d’urgence ainsi que la mise hors tension complète de l’armoire.
Les organes de coupure en façade sont préférentiellement ouverts lorsque l’armoire est hors tension.
Mise sous tension
- Actionner QF10 (disjoncteur réseau entrée onduleur)
- Actionner QF11 (si présent)
- Actionner QF40 (sortie AC onduleur)
- Actionner QF30 (disjoncteur batterie)
- Actionner QF20/21 (disjoncteur photovoltaïque)
Mise hors tension
- Mettre en position OFF QF10 (disjoncteur réseau entrée onduleur)
- Mettre en position OFF QF11 (si présent)
- Mettre en position OFF QF40 (sortie AC onduleur)
- Mettre en position OFF QF20/21 (disjoncteur photovoltaïque)
- Mettre en position OFF QF30 (disjoncteur batterie)
Danger Il y a encore la tension réseau au bornier XP. Il faut pour cela couper l’alimentation en amont.
5.2 Mise sous tension / hors tension pour AEA10000
Etapes de démarrage
Premier démarrage :
- Vérifier que le bouton d’arrêt d’urgence est désarmé.
- Enclencher tous les disjoncteurs. Le voyant « Sous tension » doit s’allumer.
- Vérifier que le voyant défaut est éteint.
Étapes d’arrêt
- Coupez les disjoncteurs DC PV
- Coupez les disjoncteurs AC si il y a présence d’un réseau de distribution
- Coupez disjoncteur QF30 (si présent)
Danger Une fois éteinte, attendre au moins 5 minutes avant d’intervenir.
5.3 Contrôle du bon fonctionnement
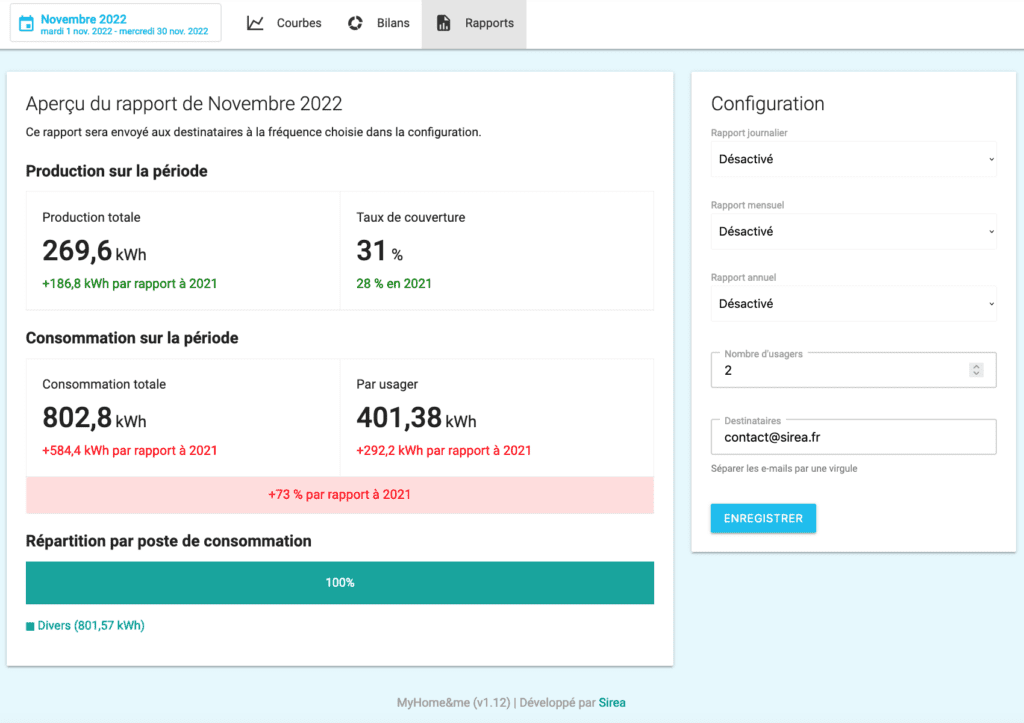
Pour vérifier le bon fonctionnement, il faudra regarder sur l’application MyHome&me (https://myhomeandme.fr/) que les informations sont bien présentes et que celles-ci soient cohérentes.

5.4 Modes de fonctionnement additionnels
Mode équilibrage
Le mode équilibrage n’est pas maîtrisé par l’utilisateur final. Le mode équilibrage permet à la batterie de faire un cycle complet si celle-ci n’est pas montée à 100% depuis 7 jours.
Si la batterie reste en dessous de 100% pendant 7 jours elle se mettra à charger via la puissance photovoltaïque. Une fois que la batterie aura atteint 100% elle reste 24h à 100% afin d’équilibrer la tension de ses cellules. Au bout de 24h, la batterie reprendra son fonctionnement normal.
La durée de la charge pour atteindre les 100% peut durer plusieurs jours selon l’ensoleillement.
L’équilibrage se produira essentiellement durant la période hivernale là où l’ensoleillement est le plus faible.
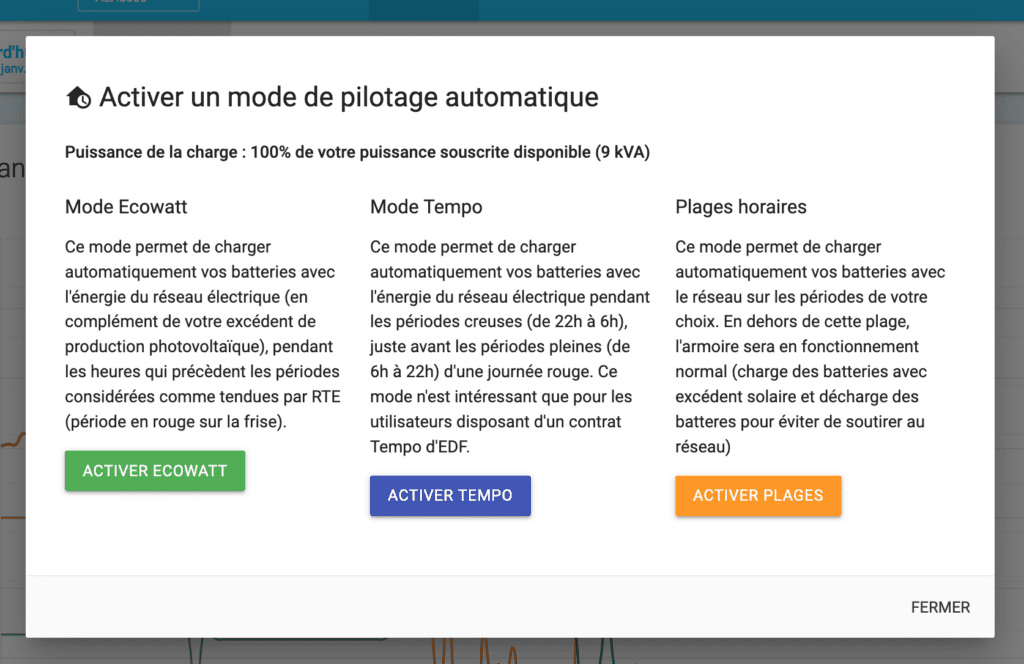
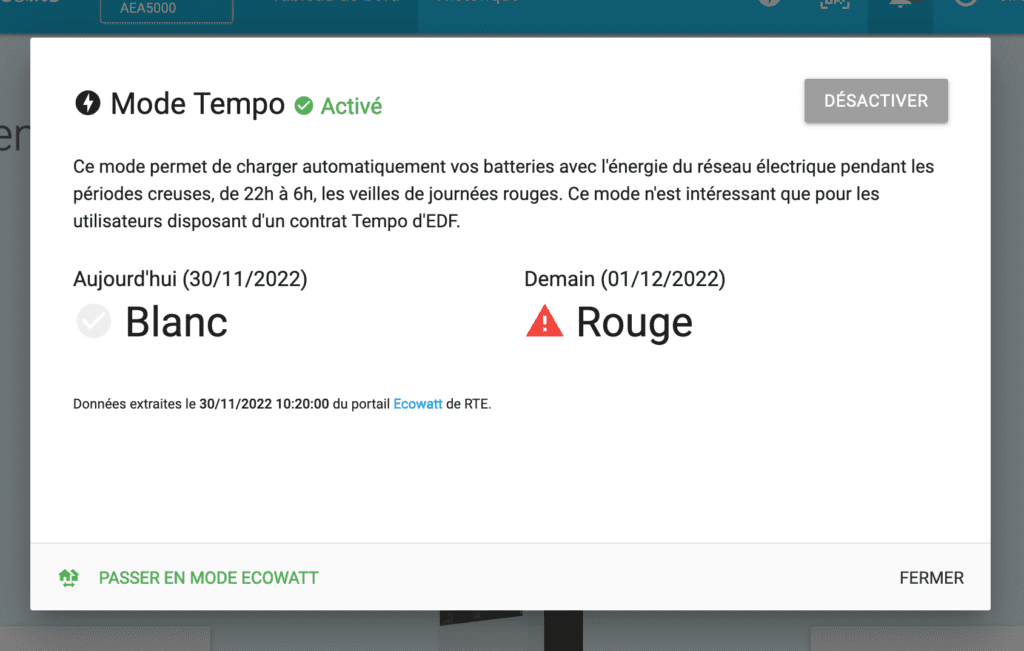
Mode tempo
L’utilisateur final peut choisir d’activer ce mode via son compte MyHome&Me.
Ce mode permet de charger automatiquement vos batteries avec l’énergie du réseau électrique pendant les périodes creuses (de 22h à 6h), juste avant les périodes pleines (de 6h à 22h) d’une journée rouge. Ce mode n’est intéressant que pour les utilisateurs disposant d’un contrat Tempo d’EDF.
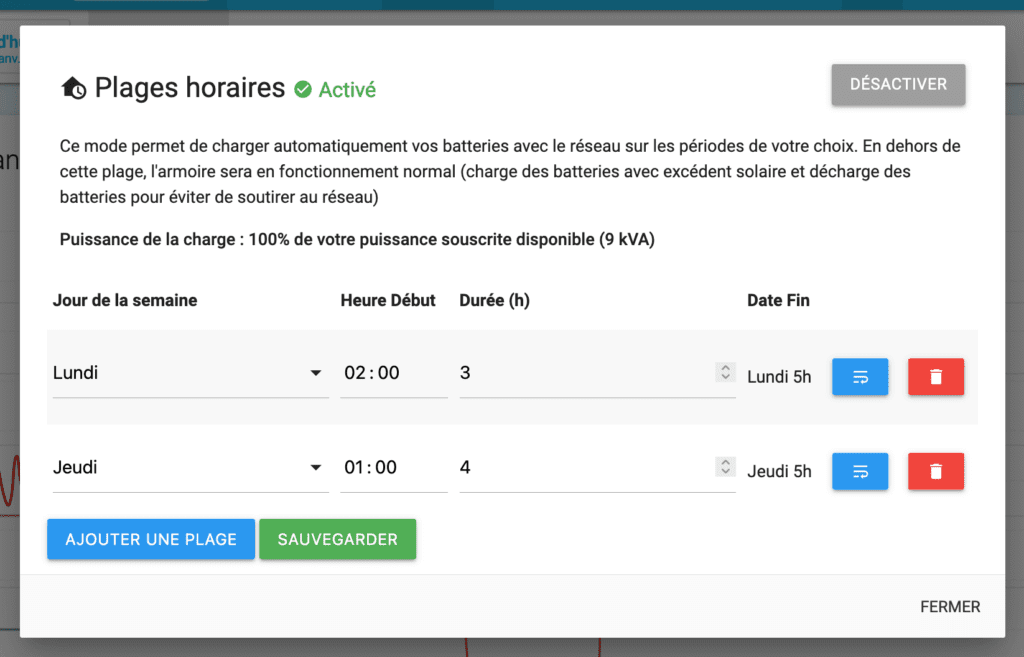
Mode période de charge
Ce mode n’est pour le moment pas maîtrisable par l’utilisateur final.
Il peut être activé en prenant contact avec l’installateur ou Sirea.
Ce mode permet de définir une période quotidienne où les batteries se mettent à charger. Par exemple de minuit à 3h du matin. Ce mode peut permettre de charger pendant les heures creuses ou bien de faire cycler la batterie durant la période hivernale.
Il n’est pas conseillé de l’utiliser pendant la période estivale.
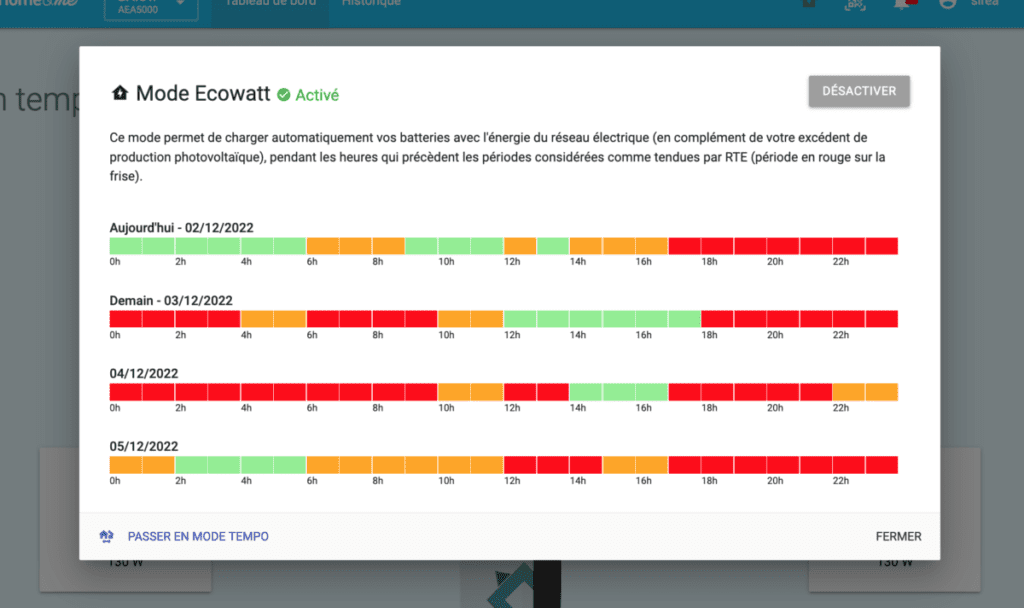
Mode Ecowatt
Ce mode permet de charger automatiquement vos batteries avec l’énergie du réseau électrique (en complément de votre excédent de production photovoltaïque), pendant les heures qui précèdent les périodes considérées comme tendues par RTE (période en rouge sur la frise).